




בקר הטיה אוטומטי עם מודולטור DP-IQ קומפקטי במיוחד


תכונה
• מספק בו זמנית שישה מתחי הטיה אוטומטיים עבור מודולטורים של Dual Polarization IQ
• ללא תלות בפורמט אפנון:
SSB, QPSK, QAM, OFDM מאומתים.
•חבר והפעל:
אין צורך בכיול ידני הכל אוטומטי
• זרועות I ו-Q: שליטה על מצבי Peak ו-Null יחס הכחדה גבוה: 50dB מקסימום
• זרוע P: בקרה על מצבי Q+ ו- Q- דיוק: ± 2◦
• פרופיל נמוך: 40 מ"מ (רוחב) × 29 מ"מ (עומק) × 8 מ"מ (גובה)
•יציבות גבוהה: יישום דיגיטלי מלא קל לשימוש:
• הפעלה ידנית עם מיני מגשר 2
פעולות גמישות של יצרן ציוד מקורי (OEM) באמצעות UART /IO
• שני מצבים לאספקת מתחי הטיה: א. בקרת הטיה אוטומטית ב. מתח הטיה מוגדר על ידי המשתמש

בַּקָשָׁה
•LiNbO3 ומודולטורים אחרים של DP-IQ
• שידור קוהרנטי
1יחס ההכחדה הגבוה ביותר תלוי ביחס ההכחדה המקסימלי של מווסת המערכת ואינו יכול לעלות על 1.
2פעולת UART זמינה רק בגרסאות מסוימות של הבקר.
ביצועים
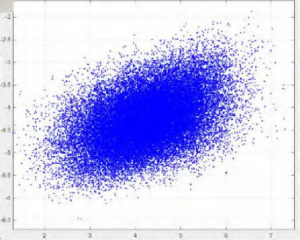
איור 1. קבוצת כוכבים (ללא בקר)
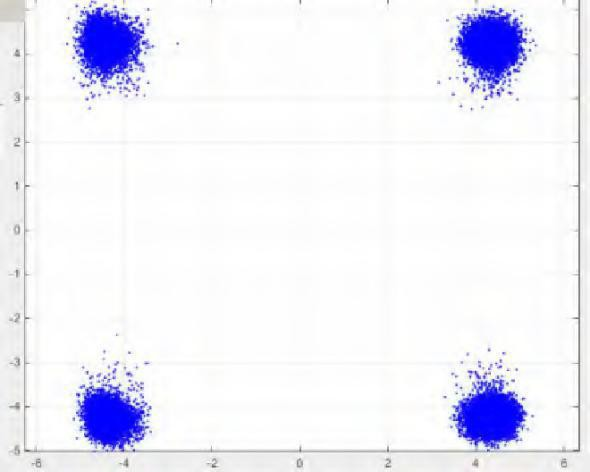
איור 2. קבוצת הכוכבים QPSK (עם בקר)
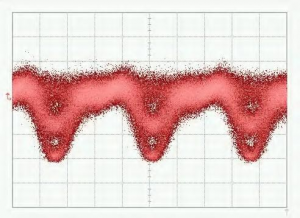
איור 3. תבנית QPSK-Eye
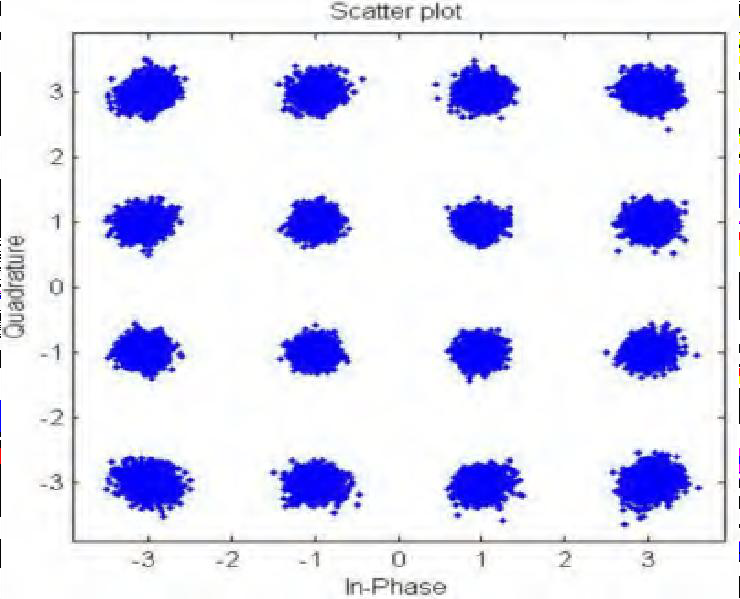
איור 5. תבנית קבוצות כוכבים 16-QAM
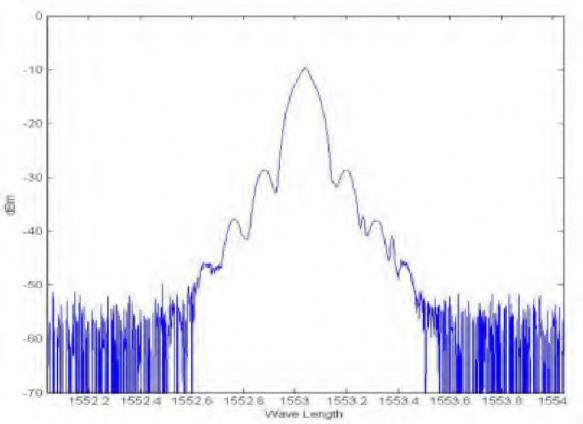
איור 4. ספקטרום QPSK

איור 6. ספקטרום CS-SSB
מפרט טכני
| פָּרָמֶטֶר | דקות | טיפוס | מקס | יְחִידָה |
| ביצועי בקרה | ||||
| זרועות I ו-Q נשלטות עלאפס (מינימום)or שיא (מקסימום)נְקוּדָה | ||||
| יחס הכחדה | מר1 | 50 | dB | |
| זרוע P נשלטת עלQ+(ריבוע ימני)or Q- (ריבוע שמאלי)נְקוּדָה | ||||
| דיוק ב-Quad | −2 | +2 | תוֹאַר2 | |
| זמן ייצוב | 45 | 50 | 55 | s |
| חַשׁמַלִי | ||||
| מתח חשמל חיובי | +14.5 | +15 | +15.5 | V |
| זרם הספק חיובי | 20 | 30 | mA | |
| מתח חשמל שלילי | -15.5 | -15 | -14.5 | V |
| זרם חשמל שלילי | 8 | 15 | mA | |
| טווח מתח יציאה של YI/YQ/XI/XQ | -14.5 | +14.5 | V | |
| טווח מתח יציאה של YP/XP | -13 | +13 | V | |
| משרעת דיטר | 1%Vπ | V | ||
| אוֹפּטִי | ||||
| עוצמת קלט אופטית3 | -30 | -8 | dBm | |
| אורך גל קלט | 1100 | 1650 | nm | |
1 MER מתייחס ליחס ההכחדה הפנימי של המודולטור. יחס ההכחדה המושג הוא בדרך כלל יחס ההכחדה של המודולטור שצוין בגיליון הנתונים של המודולטור.
2לְאַפשֵׁרVπ מסמנים את מתח ההטיה ב-180◦ וVP מציין את מתח ההטיה האופטימלי ביותר בנקודות Quad.
3שימו לב כי הספק האופטי של הקלט אינו מתייחס להספק האופטי בנקודת ההטיה שנבחרה. זהו ההספק האופטי המרבי שהמודולטור יכול לייצא לבקר כאשר מתח ההטיה נע בין−Vπ ל +Vπ .
ממשק משתמש
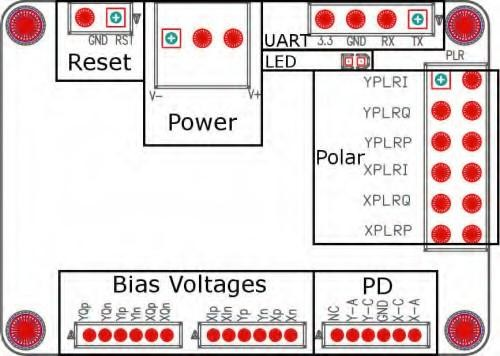
איור 5. הרכבה
| קְבוּצָה | מִבצָע | הֶסבֵּר |
| לָנוּחַ | הכנס את הג'מפר ומשוך החוצה לאחר שנייה אחת | איפוס הבקר |
| כּוֹחַ | מקור כוח לבקר הטיה | V- מחבר את האלקטרודה השלילית של ספק הכוח |
| V+ מחבר את האלקטרודה החיובית של ספק הכוח | ||
| היציאה האמצעית מתחברת לאלקטרודת הקרקע | ||
| UART | הפעלת הבקר באמצעות UART | 3.3: מתח ייחוס של 3.3V |
| GND: קרקע | ||
| RX: קליטה של בקר | ||
| TX: שידור של בקר | ||
| לד | דולק ללא הרף | עבודה תחת מצב יציב |
| הפעלה-כיבוי או הפעלה-כיבוי כל 0.2 שניות | עיבוד נתונים וחיפוש אחר נקודת בקרה | |
| הדלקה-כיבוי או הדלקה-כיבוי כל שנייה אחת | עוצמת הקלט האופטית חלשה מדי | |
| הדלקה-כיבוי או הדלקה-כיבוי כל 3 שניות | עוצמת הקלט האופטית חזקה מדי | |
| קוֹטבִי1 | XPLRI: הכנס או משיכה החוצה של הגשר | ללא מגשר: מצב ריק; עם מגשר: מצב שיא |
| XPLRQ: הכנס או משוך החוצה את הגשר | ללא מגשר: מצב ריק; עם מגשר: מצב שיא | |
| XPLRP: הכנס או משוך החוצה את הגשר | ללא מגשר: מצב Q+; עם מגשר: מצב Q- | |
| YPLRI: הכנס או משוך החוצה את הגשר | ללא מגשר: מצב ריק; עם מגשר: מצב שיא | |
| YPLRQ: הכנס או משוך החוצה את הגשר | ללא מגשר: מצב ריק; עם מגשר: מצב שיא | |
| YPLRP: הכנס או משוך החוצה את הגשר | ללא מגשר: מצב Q+; עם מגשר: מצב Q- | |
| מתחי הטיה | YQp, YQn: הטיה עבור זרוע Q של קיטוב Y | YQp: צד חיובי; YQn: צד שלילי או קרקע |
| YIp, YIn: הטיה לקיטוב Y זרוע I | YIp: צד חיובי; YIn: צד שלילי או הארקה | |
| XQp, XQn: הטיה עבור זרוע Q של קיטוב X | XQp: צד חיובי; XQn: צד שלילי או קרקע | |
| XIp, XIn: הטיה עבור קיטוב X זרוע I | XIp: צד חיובי; XIn: צד שלילי או הארקה | |
| YPp, YPn: הטיה לקיטוב Y זרוע P | YPp: צד חיובי; YPn: צד שלילי או קרקע | |
| XPp, XPn: הטיה עבור קיטוב X זרוע P | XPp: צד חיובי; XPn: צד שלילי או הארקה |
1. הקוטב תלוי באות ה-RF של המערכת. כאשר אין אות RF במערכת, הקוטב צריך להיות חיובי. כאשר אות ה-RF בעל משרעת גדולה מרמה מסוימת, הקוטב ישתנה מחיובי לשלילי. בשלב זה, נקודת האפס ונקודת השיא יתחלפו זו בזו. נקודת ה-Q+ ונקודת ה-Q- גם הן יתחלפו זו בזו. מתג הקוטב מאפשר למשתמש לשנות את
קוטב ישירות מבלי לשנות נקודות פעולה.
| קְבוּצָה | מִבצָע | הֶסבֵּר |
| PD1 | NC: לא מחובר | |
| YA: פוטודיודה עם קיטוב Y אנודה | YA ו-YC: משוב פוטו-זרם קיטוב Y | |
| YC: פוטודיודה עם קיטוב Y, קתודה | ||
| GND: קרקע | ||
| XC: קתודה של פוטודיודה עם קיטוב X | XA ו-XC: משוב פוטו-זרם קיטוב X | |
| XA: פוטודיודה עם קיטוב X אנודה |
1. יש לבחור רק אפשרות אחת בין שימוש בפוטודיודה של בקר לבין שימוש בפוטודיודה של מודולטור. מומלץ להשתמש בפוטודיודה של בקר עבור ניסויי מעבדה משתי סיבות. ראשית, לפוטודיודה של הבקר יש איכויות מובטחות. שנית, קל יותר להתאים את עוצמת אור הקלט. אם משתמשים בפוטודיודה פנימית של המודולטור, יש לוודא שזרם המוצא של הפוטודיודה פרופורציונלי לחלוטין להספק הקלט.
חברת Rofea Optoelectronics מציעה קו מוצרים של מודולטורים אלקטרו-אופטיים מסחריים, מודולטורי פאזה, מודולטורי עוצמה, גלאי אור, מקורות אור לייזר, לייזרי DFB, מגברים אופטיים, EDFA, לייזר SLD, מודולציה QPSK, לייזר דופק, גלאי אור, גלאי אור מאוזן, דרייבר לייזר, מגבר סיבים אופטיים, מד הספק אופטי, לייזר פס רחב, לייזר מתכוונן, גלאי אופטי, דרייבר דיודה לייזר, מגבר סיבים. אנו מספקים גם מודולטורים רבים להתאמה אישית, כגון מודולטורי פאזה במערך 1*4, מודולטורי VPI נמוך במיוחד ומודולטורים בעלי יחס הכחדה גבוה במיוחד, המשמשים בעיקר באוניברסיטאות ובמכונים.
מקווים שהמוצרים שלנו יהיו לעזר לך ולמחקר שלך.


