




עיצוב שלפוטונימעגל משולב
מעגלים משולבים פוטונייםאינטרפרומטרים (PIC) מתוכננים לעתים קרובות בעזרת סקריפטים מתמטיים בגלל חשיבות אורך הנתיב באינטרפרומטרים או ביישומים אחרים הרגישים לאורך הנתיב.תמונהמיוצר על ידי יצירת שכבות מרובות (בדרך כלל 10 עד 30) על גבי פרוסת סיליקון (wafer), המורכבת מצורות מצולעות רבות, המיוצגות לעתים קרובות בפורמט GDSII. לפני שליחת הקובץ ליצרן הפוטומסכה, רצוי מאוד להיות מסוגלים לדמות את ה-PIC כדי לאמת את נכונות התכנון. הסימולציה מחולקת למספר רמות: הרמה הנמוכה ביותר היא סימולציית אלקטרומגנטית תלת-ממדית (EM), שבה הסימולציה מבוצעת ברמת תת-אורך הגל, אם כי האינטראקציות בין אטומים בחומר מטופלות בקנה מידה מקרוסקופי. שיטות אופייניות כוללות תלת-ממדית של תחום זמן סופי-הפרש (3D FDTD) והרחבת מצב עצמי (EME). שיטות אלו הן המדויקות ביותר, אך אינן מעשיות לכל זמן סימולציית ה-PIC. הרמה הבאה היא סימולציית EM דו-ממדית וחצי-ממדית, כגון התפשטות קרן הפרש סופי (FD-BPM). שיטות אלו מהירות בהרבה, אך פוגעות בדיוק מסוים ויכולות להתמודד רק עם התפשטות פאראקסיאלית ולא ניתן להשתמש בהן כדי לדמות תהודה, למשל. הרמה הבאה היא סימולציית קרינה אלקטרונית דו-ממדית (EM) דו-ממדית, כגון FDTD דו-ממדית ו-BPM דו-ממדית. אלו גם מהירות יותר, אך בעלות פונקציונליות מוגבלת, כגון שהן אינן יכולות לדמות מסובבי קיטוב. רמה נוספת היא סימולציית מטריצת העברה ו/או פיזור. כל רכיב עיקרי מצטמצם לרכיב עם קלט ופלט, ומוליך הגל המחובר מצטמצם לרכיב הזזת פאזה והנחתה. סימולציות אלו מהירות ביותר. אות הפלט מתקבל על ידי הכפלת מטריצת ההעברה באות הקלט. מטריצת הפיזור (שאלמנטיה נקראים פרמטרי S) מכפילה את אותות הקלט והפלט בצד אחד כדי למצוא את אותות הקלט והפלט בצד השני של הרכיב. בעיקרון, מטריצת הפיזור מכילה את ההשתקפות בתוך האלמנט. מטריצת הפיזור בדרך כלל גדולה פי שניים ממטריצת ההעברה בכל ממד. לסיכום, מ-EM תלת-ממדית ועד סימולציית מטריצת העברה/פיזור, כל שכבת סימולציה מציגה פשרה בין מהירות לדיוק, ומתכננים בוחרים את רמת הסימולציה המתאימה לצרכיהם הספציפיים כדי לייעל את תהליך אימות התכנון.
עם זאת, הסתמכות על סימולציה אלקטרומגנטית של אלמנטים מסוימים ושימוש במטריצת פיזור/העברה כדי לדמות את כל ה-PIC אינה מבטיחה תכנון נכון לחלוטין מול לוח הזרימה. לדוגמה, אורכי נתיב מחושבים בצורה שגויה, מוליכי גל רב-אופניים שאינם מצליחים לדכא ביעילות מצבים מסדר גבוה, או שני מוליכי גל הקרובים מדי זה לזה המובילים לבעיות צימוד בלתי צפויות, סביר להניח שלא יתגלו במהלך הסימולציה. לכן, למרות שכלי סימולציה מתקדמים מספקים יכולות אימות תכנון חזקות, עדיין נדרשת דרגה גבוהה של ערנות ובדיקה מדוקדקת מצד המתכנן, בשילוב עם ניסיון מעשי וידע טכני, כדי להבטיח את דיוק ואמינות התכנון ולהפחית את הסיכון של לוח הזרימה.
טכניקה הנקראת FDTD דליל מאפשרת לבצע סימולציות FDTD תלת-ממדיות ודו-ממדיות ישירות על תכנון PIC שלם כדי לאמת את התכנון. למרות שקשה לכל כלי סימולציה אלקטרומגנטית לדמות PIC בקנה מידה גדול מאוד, ה-FDTD הדליל מסוגל לדמות שטח מקומי גדול למדי. ב-FDTD תלת-ממדי מסורתי, הסימולציה מתחילה באתחול ששת הרכיבים של השדה האלקטרומגנטי בתוך נפח כמותי ספציפי. עם הזמן, מחושב רכיב השדה החדש בנפח, וכן הלאה. כל שלב דורש חישוב רב, ולכן זה לוקח זמן רב. ב-FDTD תלת-ממדי דליל, במקום לחשב בכל שלב בכל נקודה של הנפח, נשמרת רשימה של רכיבי שדה שיכולים תיאורטית להתאים לנפח גדול באופן שרירותי ולהיות מחושבים רק עבור רכיבים אלה. בכל שלב זמן, מתווספות נקודות הסמוכות לרכיבי שדה, בעוד שרכיבי שדה מתחת לסף הספק מסוים נשמטים. עבור מבנים מסוימים, חישוב זה יכול להיות מהיר בכמה סדרי גודל מאשר FDTD תלת-ממדי מסורתי. עם זאת, FDTDS דלילים אינם מתפקדים היטב כאשר מתמודדים עם מבנים מפזרים מכיוון ששדה זמן זה מתפשט יותר מדי, וכתוצאה מכך נוצרות רשימות ארוכות מדי וקשות לניהול. איור 1 מציג צילום מסך לדוגמה של סימולציית FDTD תלת-ממדית הדומה למפצל קרן קיטוב (PBS).
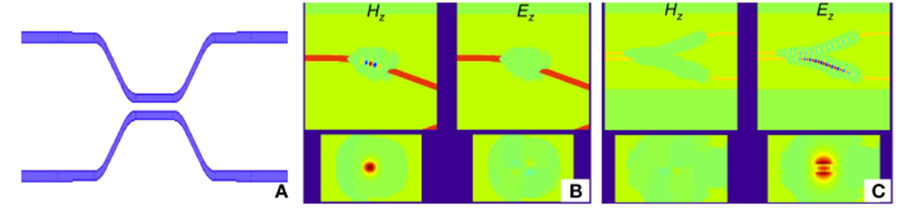
איור 1: תוצאות סימולציה מ-FDTD דליל תלת-ממדי. (א) הוא מבט מלמעלה של המבנה המדומה, שהוא מצמד כיווני. (ב) מציג צילום מסך של סימולציה המשתמשת בעירור קוואזי-TE. שתי הדיאגרמות למעלה מציגות את התצוגה מלמעלה של אותות קוואזי-TE ו-quasi-TM, ושתי הדיאגרמות למטה מציגות את תצוגת החתך הרוחב המתאימה. (ג) מציג צילום מסך של סימולציה המשתמשת בעירור קוואזי-TM.
זמן פרסום: 23 ביולי 2024