




בקר הטיה אוטומטי עם מודולטור MZM מדויק במיוחד


תכונה
• בקרת מתח הטיה על שיא/אפס/Q+/Q−
• בקרת מתח הטיה בנקודה שרירותית
• בקרה מדויקת במיוחד: יחס כיבוי מקסימלי של 50dB במצב Null;
דיוק של ±0.5◦ במצבי Q+ ו-Q−
• אמפליטודה נמוכה של דיטר:
0.1% Vπ במצב NULL ובמצב PEAK
2% Vπ במצב Q+ ובמצב Q−
• יציבות גבוהה: עם יישום דיגיטלי מלא
• פרופיל נמוך: 40 מ"מ (רוחב) × 30 מ"מ (עומק) × 10 מ"מ (גובה)
• קל לשימוש: הפעלה ידנית עם מיני-ג'מפר;
פעולות גמישות של יצרן ציוד מקורי (OEM) באמצעות מיקרו-בקר UART2
• שני מצבים שונים לאספקת מתח הטיה: א. בקרת הטיה אוטומטית
ב. מתח הטיה מוגדר על ידי המשתמש

בַּקָשָׁה
• LiNbO3 ומווסתני MZ אחרים
• NRZ דיגיטלי, RZ
• יישומי Pulse
• מערכת פיזור ברילואן וחיישנים אופטיים אחרים
• משדר CATV
ביצועים
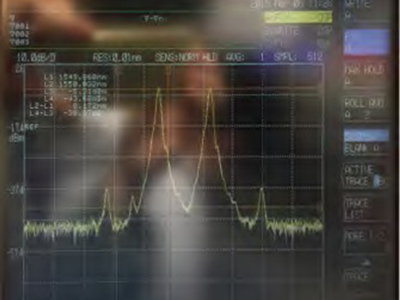
איור 1. דיכוי נושאי תקשורת
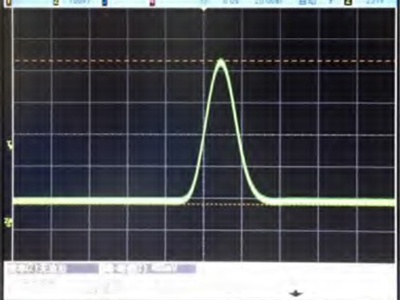
איור 2. יצירת פולסים

איור 3. הספק מרבי של המודולטור
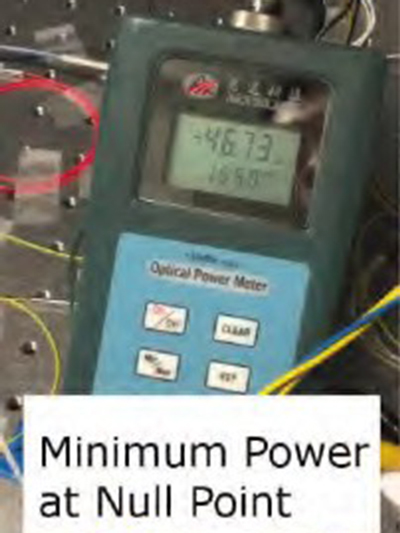
איור 4. הספק מינימלי של מודולטור
יחס הכחדה מקסימלי של DC
בניסוי זה, לא הופעלו אותות RF על המערכת. נמדד כיבוי DC טהור.
1. איור 5 מדגים את ההספק האופטי של פלט המודולטור, כאשר המודולטור נשלט בנקודת שיא. הוא מציג 3.71dBm בתרשים.
2. איור 6 מציג את ההספק האופטי של פלט המודולטור, כאשר המודולטור נשלט בנקודת אפס. הוא מראה -46.73dBm בתרשים. בניסוי אמיתי, הערך משתנה סביב -47dBm; ו- -46.73 הוא ערך יציב.
3. לכן, יחס ההכחדה היציב של זרם ישר (DC) שנמדד הוא 50.4dB.
דרישות ליחס הכחדה גבוה
1. מודולטור המערכת חייב להיות בעל יחס הכחדה גבוה. מאפיין מודולטור המערכת קובע את יחס ההכחדה המקסימלי שניתן להשיג.
2. יש לטפל בקיטוב של אור הקלט של המודולטור. מודולטורים רגישים לקיטוב. קיטוב נכון יכול לשפר את יחס ההכחדה מעל 10dB. בניסויי מעבדה, בדרך כלל נדרש בקר קיטוב.
3. בקרי הטיה מתאימים. בניסוי יחס ההכחדה של זרם ישר (DC) שלנו, הושג יחס הכחדה של 50.4dB. בעוד שגיליון הנתונים של יצרן המודולטור מציין רק 40dB. הסיבה לשיפור זה היא שחלק מהמודולטורים סוחפים מהר מאוד. בקרי ההטיה Rofea R-BC-ANY מעדכנים את מתח ההטיה כל שנייה כדי להבטיח תגובה מהירה.
מפרט טכני
| פָּרָמֶטֶר | דקות | טיפוס | מקס | יְחִידָה | תנאים |
| ביצועי בקרה | |||||
| יחס הכחדה | מר 1 | 50 | dB | ||
| CSO2 | −55 | −65 | −70 | dBc | משרעת דיטר: 2%Vπ |
| זמן ייצוב | 4 | s | נקודות מעקב: אפס ושיא | ||
| 10 | נקודות מעקב: Q+ ו-Q- | ||||
| חַשׁמַלִי | |||||
| מתח חשמל חיובי | +14.5 | +15 | +15.5 | V | |
| זרם הספק חיובי | 20 | 30 | mA | ||
| מתח חשמל שלילי | -15.5 | -15 | -14.5 | V | |
| זרם חשמל שלילי | 2 | 4 | mA | ||
| טווח מתח יציאה | -9.57 | +9.85 | V | ||
| דיוק מתח המוצא | 346 | מיקרו-וולט | |||
| תדירות דיטר | 999.95 | 1000 | 1000.05 | Hz | גרסה: אות דיטר 1kHz |
| משרעת דיטר | 0.1% וולטπ | V | נקודות מעקב: אפס ושיא | ||
| 2%Vπ | נקודות מעקב: Q+ ו-Q- | ||||
| אוֹפּטִי | |||||
| עוצמת קלט אופטית3 | -30 | -5 | dBm | ||
| אורך גל קלט | 780 | 2000 | nm | ||
1. MER מתייחס ליחס הכחדה של המודולטור. יחס ההכחדה המושג הוא בדרך כלל יחס ההכחדה של המודולטור שצוין בגיליון הנתונים של המודולטור.
2. CSO מתייחס ל-composite מסדר שני. כדי למדוד CSO בצורה נכונה, יש להבטיח את האיכות הליניארית של אות ה-RF, המודולטורים והמקלטים. בנוסף, קריאות ה-CSO של המערכת עשויות להשתנות כאשר הן פועלות בתדרי RF שונים.
3. שימו לב כי הספק הקלט האופטי אינו תואם את ההספק האופטי בנקודת ההטיה שנבחרה. הוא מתייחס להספק האופטי המרבי שהמודולטור יכול לייצא לבקר כאשר מתח ההטיה נע בין −Vπ ל-+Vπ.
ממשק משתמש
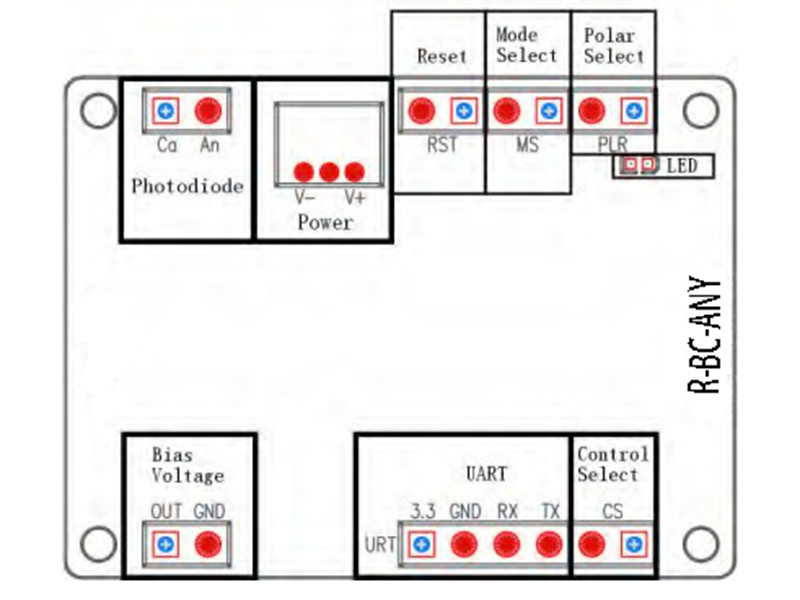
איור 5. הרכבה
| קְבוּצָה | מִבצָע | הֶסבֵּר |
| פוטודיודה 1 | PD: חבר את הקתודה של פוטודיודת MZM | ספק משוב פוטו-זרם |
| GND: חבר את האנודה של הפוטודיודה MZM | ||
| כּוֹחַ | מקור כוח לבקר הטיה | V-: מחבר את האלקטרודה השלילית |
| V+: מחבר את האלקטרודה החיובית | ||
| גשש אמצעי: מחבר את אלקטרודת ההארקה | ||
| אִתחוּל | הכנס את הג'מפר ומשוך החוצה לאחר שנייה אחת | איפוס הבקר |
| בחירת מצב | הכנס או משוך החוצה את הג'מפר | ללא מגשר: מצב Null; עם מגשר: מצב Quad |
| פולאר סלקט2 | הכנס או משוך החוצה את הג'מפר | ללא מגשר: קוטביות חיובית; עם מגשר: קוטביות שלילית |
| מתח הטיה | התחבר ליציאת מתח ההטיה של MZM | OUT ו-GND מספקים מתחי הטיה עבור המודולטור |
| לד | באופן מתמיד דולק | עבודה תחת מצב יציב |
| הפעלה-כיבוי או הפעלה-כיבוי כל 0.2 שניות | עיבוד נתונים וחיפוש אחר נקודת בקרה | |
| הדלקה-כיבוי או הדלקה-כיבוי כל שנייה אחת | עוצמת הקלט האופטית חלשה מדי | |
| הדלקה-כיבוי או הדלקה-כיבוי כל 3 שניות | עוצמת הקלט האופטית חזקה מדי | |
| UART | הפעלת הבקר באמצעות UART | 3.3: מתח ייחוס של 3.3V |
| GND: קרקע | ||
| RX: קליטה של בקר | ||
| TX: שידור של בקר | ||
| בחירת שליטה | הכנס או משוך החוצה את הג'מפר | ללא מגשר: בקרת מגשר; עם מגשר: בקרת UART |
1. לחלק מהמודולטורים של MZ יש פוטודיודות פנימיות. יש לבחור בין שימוש בפוטודיודה של הבקר לבין שימוש בפוטודיודה פנימית של המודולטור. מומלץ להשתמש בפוטודיודה של הבקר עבור ניסויי מעבדה משתי סיבות. ראשית, פוטודיודה של הבקר מבטיחה איכות. שנית, קל יותר להתאים את עוצמת אור הקלט. הערה: אם משתמשים בפוטודיודה פנימית של המודולטור, יש לוודא שזרם המוצא של הפוטודיודה פרופורציונלי לחלוטין להספק הקלט.
2. פין פולארי משמש להחלפת נקודת הבקרה בין שיא לאפס במצב בקרת אפס (נקבע על ידי פין בחירת מצב) או Quad+
ו-Quad- במצב בקרה Quad. אם המגשר של פין הקוטב לא מוכנס, נקודת הבקרה תהיה Null במצב Null או Quad+ במצב Quad. משרעת מערכת ה-RF תשפיע גם היא על נקודת הבקרה. כאשר אין אות RF או שמשרעת אות ה-RF קטנה, הבקר מסוגל לנעול את נקודת העבודה לנקודה הנכונה כפי שנבחר על ידי MS ומגשר PLR. כאשר משרעת אות ה-RF עולה על סף מסוים, הקוטב של המערכת ישתנה, במקרה זה, כותרת PLR צריכה להיות במצב הפוך, כלומר יש להכניס את המגשר אם אינו מוכנס או לשלוף אותו אם הוא מוכנס.
יישום אופייני
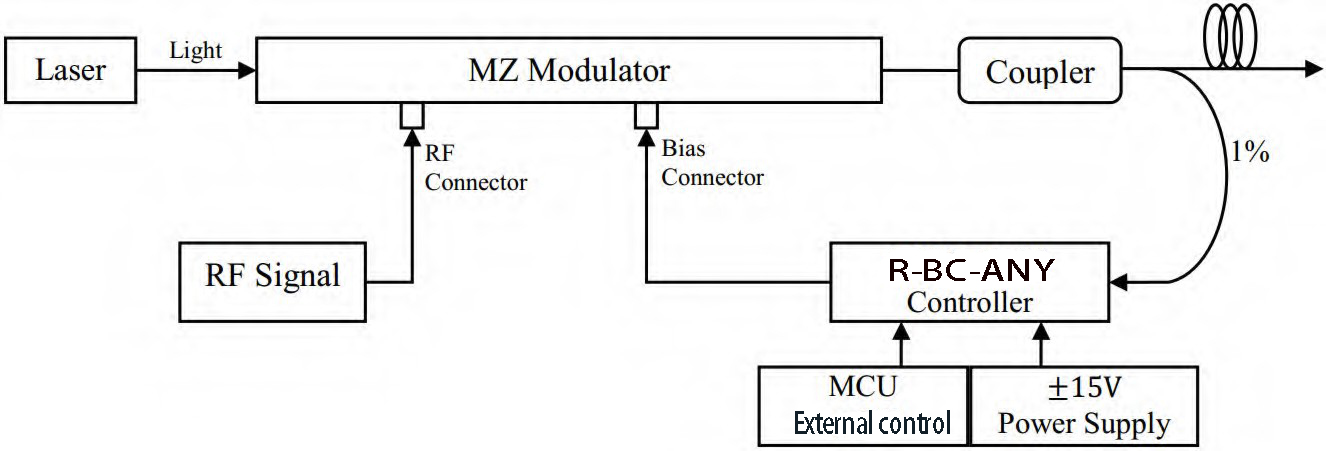
הבקר קל לשימוש.
שלב 1. חבר את יציאת 1% של המצמד לפוטודיודה של הבקר.
שלב 2. חבר את יציאת מתח ההטיה של הבקר (דרך SMA או פין 2.54 מ"מ בעל 2 פינים) ליציאת ההטיה של המודולטור.
שלב 3. ספקו לבקר מתחי DC של +15V ו--15V.
שלב 4. אפס את הבקר והוא יתחיל לעבוד.
הערה. יש לוודא שאות ה-RF של המערכת כולה פועל לפני איפוס הבקר.
חברת Rofea Optoelectronics מציעה קו מוצרים של מודולטורים אלקטרו-אופטיים מסחריים, מודולטורי פאזה, מודולטורי עוצמה, גלאי אור, מקורות אור לייזר, לייזרי DFB, מגברים אופטיים, EDFA, לייזר SLD, מודולציה QPSK, לייזר דופק, גלאי אור, גלאי אור מאוזן, דרייבר לייזר, מגבר סיבים אופטיים, מד הספק אופטי, לייזר פס רחב, לייזר מתכוונן, גלאי אופטי, דרייבר דיודה לייזר, מגבר סיבים. אנו מספקים גם מודולטורים רבים להתאמה אישית, כגון מודולטורי פאזה במערך 1*4, מודולטורי VPI נמוך במיוחד ומודולטורים בעלי יחס הכחדה גבוה במיוחד, המשמשים בעיקר באוניברסיטאות ובמכונים.
מקווים שהמוצרים שלנו יהיו לעזר לך ולמחקר שלך.


